Step1
例題
Step2
測量点1の座標を求める
測量点1のX,Y座標を求めます。ここの計算はDay2の計算方法と同じになります。
まず、角度Tを求めます。

次に方向角を求めます。
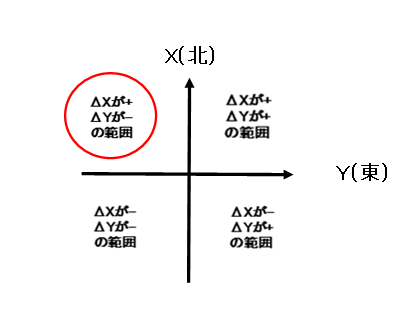
ここで、ΔXとΔYの符号が大事になります。(北方向がわからないため)

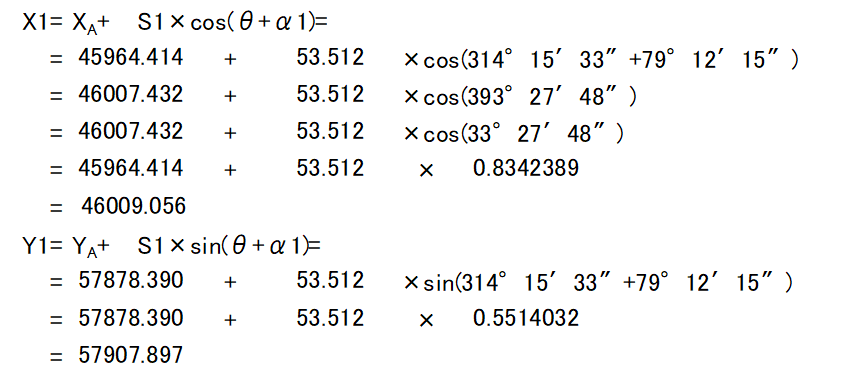
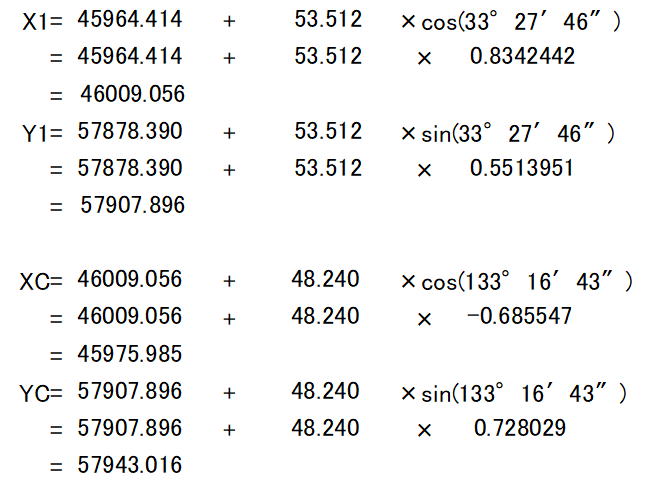
方向角が求まりましたので、後はX,Yそれぞれの値を求めます。
Step3
測量点2,3の座標を求める
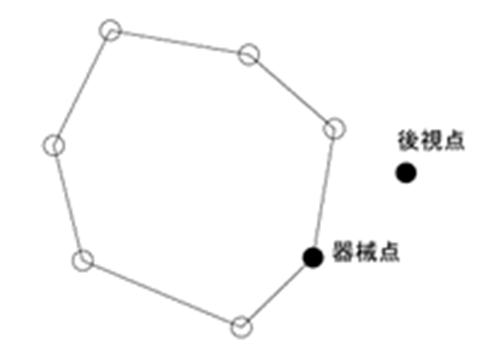
測量点2の観測は測量点1を器械点、既知点Aを後視点として行われます。
測量点1及び既知点Aそれぞれの座標がわかるので、これまでの手順と同じく計算しても良いのですが、ここではもっと簡単な別の方法で計算します。
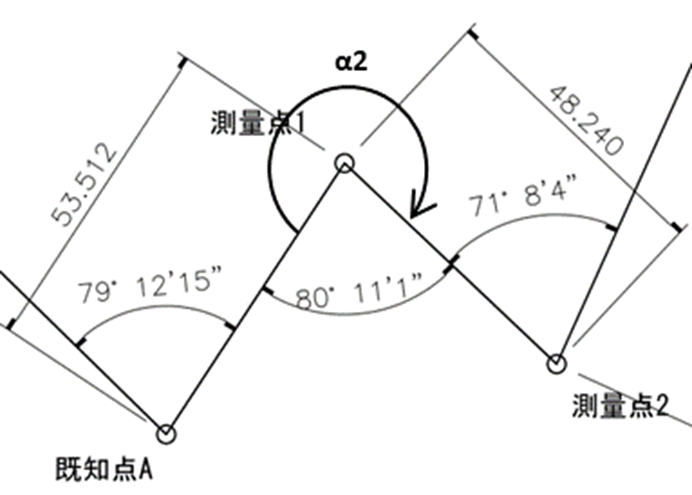
まず、画像に示す角度は器械点と後視点の関係から夾角でないことがわかります。そのため夾角を算出します。

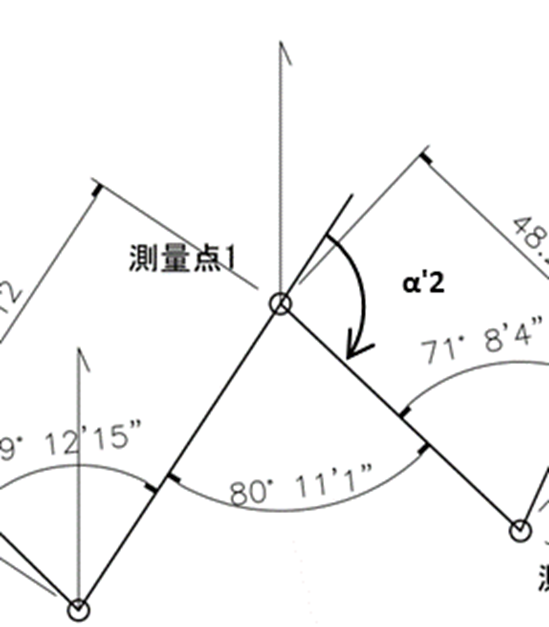
次にα2から180°を引きます。画像のとおりα'2が残ります。

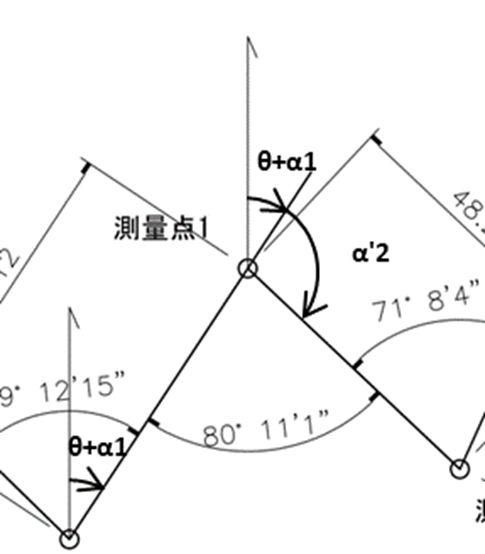
α'2に測量点1の時に計算したθ+α1(以後βとします)を足します。そうするとX座標、Y座標の計算がすぐに可能となります。 つまり、この多角方式の観測図の場合、以下の式でX,Y座標が計算できるようになります。

実際の計算は以下のとおりになります。
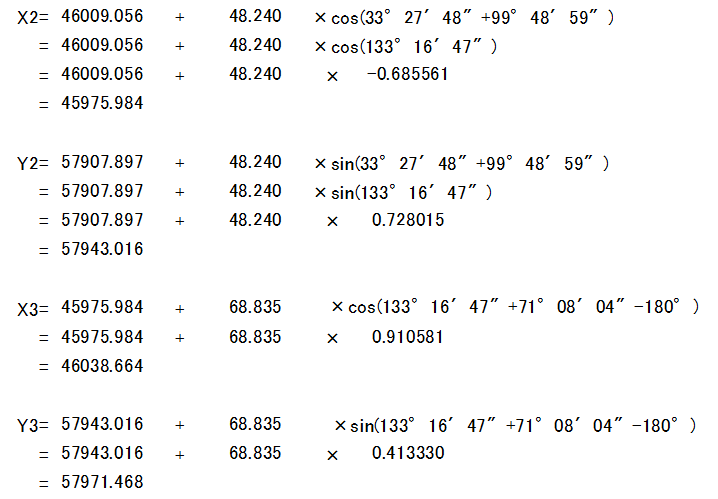
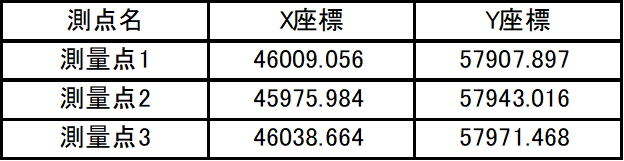
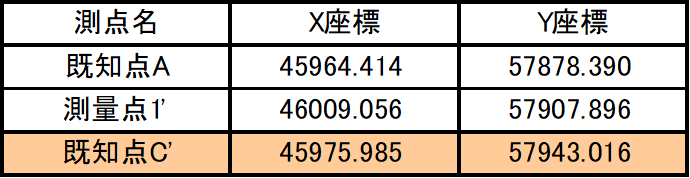
計算結果は以下のとおりになります。
Step4
補正と精度
座標計算が終わりましたので、次は精度の確認をします。ただし例題のままの条件では精度確認ができませんので、ここでは少し条件変更をします。
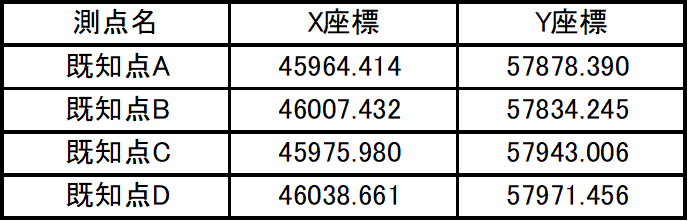
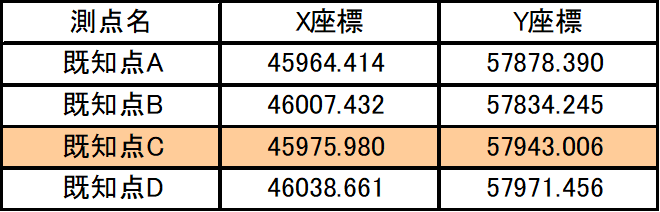
測量点2、3を既知点とし、それぞれ既知点C、既知点Dとします。各々の座標は以下のとおりとします。

観測で求まる既知点CおよびDの方向角(最後の観測角)と、既知点CおよびDに新たに与えた座標で求まる方向角に差がでるストーリーとして、これを補正することにします。
まず、与えた座標値から方向角を計算すると以下のとおりとなります。

次に観測結果から方向角を求めます。

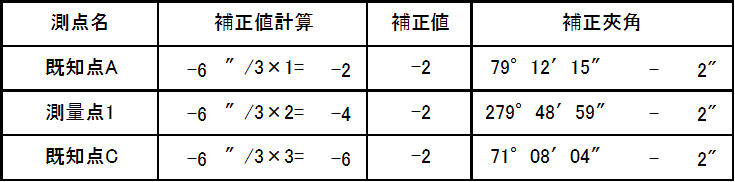
既知点Cで既知方向角は、θC=24°24′45″であるから方向角の閉合誤差Δθは+6"(正しい方向に対して6"大きい)となります。ここで、この誤差を各観測夾角に均等配分(測点平均)します。
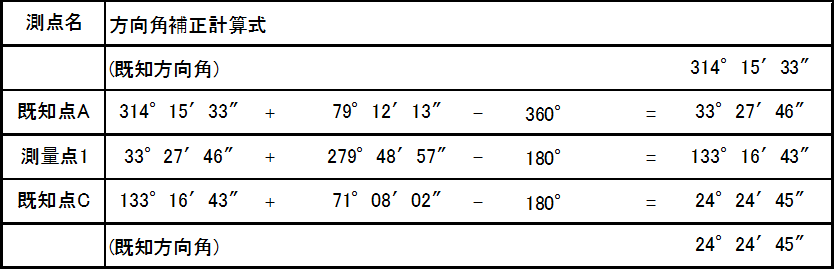
補正夾角を用いて、再度、各測点の方向角を計算しなおします。

再計算した補正方向角と水平距離を使用し、各測点の仮座標計算をします。
各測点の仮座標計算結果は画像のとおりとなります。
仮座標まで終わりましたので、いよいよ閉合差を求め精度確認を行います。精度が制限内であれば閉合誤差の補正計算を行い、それをもとに再度各測点の座標を計算します。
それでは閉合差を計算します。既知点Cの座標と仮座標計算で求めたC点の仮座標との差を求めます。

閉合差は1.2cmになります。


閉合差が求まりましたので、この値を観測距離の合計で割ります。これが精度になります。今回この値は特に気にする必要はありません。

今回の測量が4級基準点測量とすると、許容範囲は以下のとおりとなります。(許容範囲はまたいつか書こうと思います。)

ここで、Nは辺数、Sは路線長(km)となります。
この許容範囲を計算すると以下のとおり16.4cmとなります。閉合差1.2cmはこの許容範囲より小さいので今回の測量は合格となります。

合格であるので閉合誤差補正計算を行います。既知点CのX座標およびY座標の差を求めます。

求めた差を画像のとおり各点に均等配分します。
最後に仮座標計算で求めた仮座標に座標補正値を加えたら完了です。
閉合トラバースの場合は、外角もしくは内角の総和から夾角を補正すします。内角の和は180°✕(n-2)、
外角の和は180°✕(n+2)の式を利用することになります。ここでnは辺数になります。
以上で「自力で座標計算 その2」を終わります。
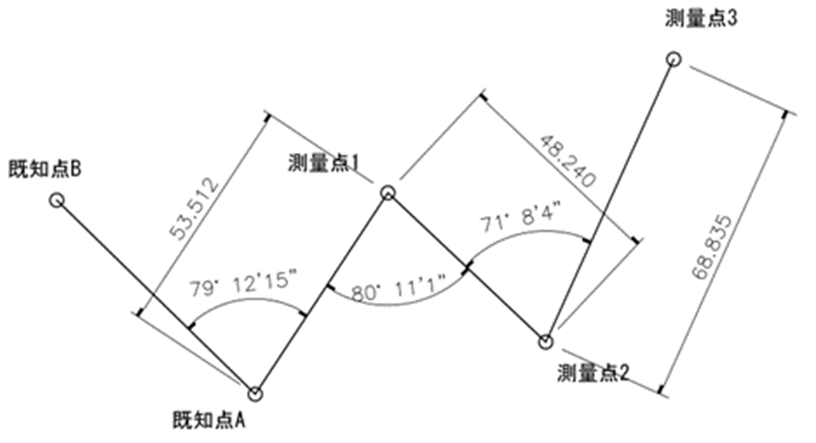
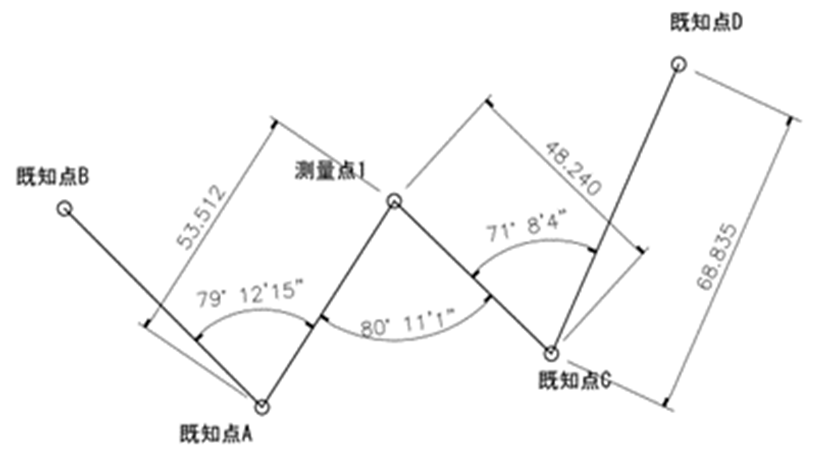
今回は基準点AおよびB(既知点AおよびB)があり、それぞれの座標は既知であるとします。この基準点を利用した測量結果から測量点1~3の座標計算をすることとします。
また、測量点2、3を既知点とした場合の精度を確認し、測量点1の座標を補正することとする。
既知点AおよびBの座標値は以下のとおりとし、観測結果は画像内の値とします。